دفتر تهران : ۰۲۱۹۱۰۹۰۰۸۳
دفتر اصفهان : ۰۳۱۳۲۳۶۸۰۸۳
Info@Pinion.ir

انکودر چرخشی که انکودر شفت نیز نامیده میشود، یک تجهیز الکترومکانیکی است که حرکت یا موقعیت زاویهای یک شفت یا محور را به یک سیگنال خروجی دیجیتالی تبدیل میکند.
گروه فنی مهندسی بازرگانی پینیون در زمینه فروش و بازرگانی انواع تجهیزات برق و الکترونیک از جمله انکودرهای چرخشی (روتاری) ، در صنعت آسانسور و اتوماسیون فعالیت دارد.
انکودر چرخشی که انکودر شفت نیز نامیده میشود، یک تجهیز الکترومکانیکی است که حرکت یا موقعیت زاویهای یک شفت یا محور را به یک سیگنال خروجی دیجیتالی تبدیل میکند. گروه فنی مهندسی بازرگانی پینیون در زمینه فروش و بازرگانی انواع تجهیزات برق و الکترونیک از جمله انکودرهای چرخشی (روتاری) ، در صنعت آسانسور و اتوماسیون فعالیت دارد.
این انکودر ها کاربرد گستردهای در زمینهی نظارت و کنترل ( یا هر دو) سیستمهای مکانیکی دارند. به طور مثال میتوان به کاربرد آنها در صنعت، رباتیک، لنزهای عکاسی، موتور آسانسور، سختافزارهای کامپیوتری مختلف مانند موسهای توپی (Trackball Mouse) و سیستمهای رادار چرخشی اشاره کرد. انکودرهای چرخشی همچنین در مواردی مانند سروو موتورها (موتورهای کنترل) که سیستم کنترل عملیاتی آنها به صورت پاسخ سیگنال بازخوردی است، کاربرد دارند. در مواقعی که لازم است دقت کار بالا باشد، انکودر چرخشی انتخاب مناسبی است.

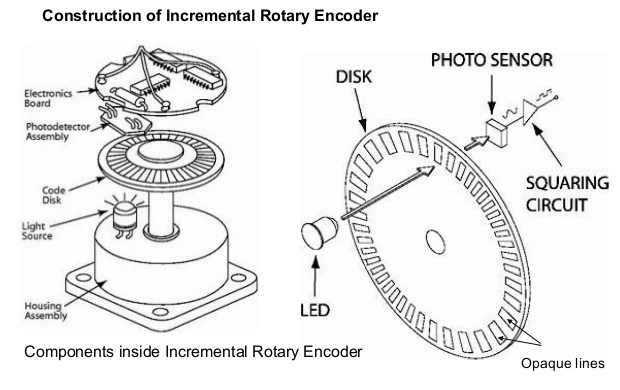
در انکودرهای چرخشی، یک دیسک به شفت اصلی متصل میشود و اندازهگیری پالسهای ورودی را برعهده دارد. در نهایت هنگام بررسی پاسخ خروجی سطح این دیسکها را به قسمتهایی تقسیم میکنند. هرچه تعداد قسمتهای سفید و سیاه بیشتر باشد، دقت اندازهگیری در آن انکودر به مرتب بیشتر خواهد بود.
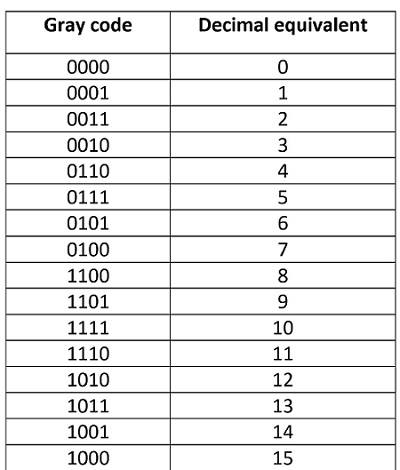
در این رمزگذاری موقعیت توسط کد باینری بیان می شود. در حالت عادی به ازای n تماس،تعداد 2n موقعیت زاویهای برای شفت وجود دارد. با توجه به تعداد تقسیم بندی هر دیسک، تعداد حلقه های نشاندهندهی بیت کم یا زیاد می شوند.

در این روش هر کد با کد قبل از خود تنها یک بیت تفاوت دارد. دقت این نوع رمزگذاری از رمزگذاری مطلق بیشتر است.
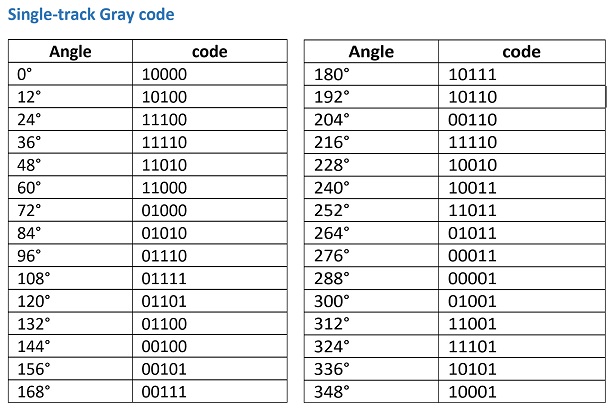
اگر یک قسمت از انکودر به در فاصلهی ثابت از شفت، تغییر موقعیت زاویهای بدهد، آنگاه لازم است که الگوی حلقهی مربوطه نیز به زاویهی جدیدی چرخانده شود تا همان خروجی را نشان دهد. از آنجایی که هر دو حلقه بر هم منطبق هستند، حلقهی درونی میتواند حذف شود. در نتیجه سنسور به حلقههای بعدی (باقیمانده) منتقل میشود. ممکن است چند سنسور اطراف یک حلقه قرار بگیرد. در آن صورت موقعیتهای متوالی، تنها در یک سنسور اختلاف دارند. نتیجهی این تغییرات رمزگذاری گری تک مسیره نامیده میشود.
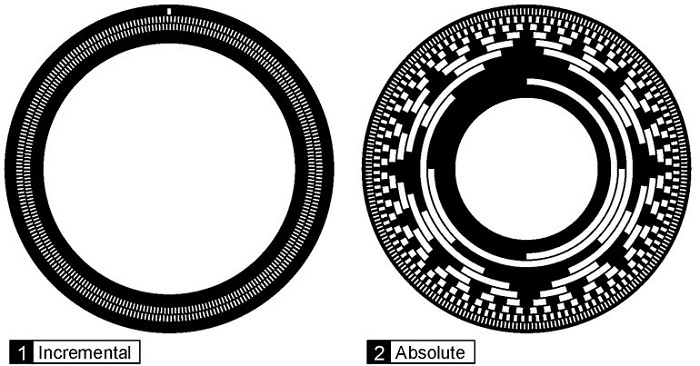
این انکودرها از لحاظ سیگنال خروجی به دو دستهی اصلی تقسیم میشوند:
انکودر مطلق این توانایی را دارد که موقعیت شفت را بصورت مطلق و بدون نیاز به نقطه مرجع بخواند. این نوع انکودر موقعیت لحظهای هر شفت را پیدا کرده و با قطع شدن منبع انرژی، اطلاعات موقعیتی شفت را حفظ میکند و در ادامه از آن یک مبدل زاویهای میسازد. لازم به ذکر است که موقعیت شفت به صورت کد دیجیتالی ۰ و ۱ گزارش میشود و هر لحظه درحال تغییر است. انواع انکودر مطلق را در مقالهای دیگر توضیح میدهیم و در این مقاله به آوردن نام آنها بسنده میکنیم.

این انکودرها اطلاعاتی دربارهی حرکت شفت فراهم میکند و معمولا در جایی دیگر این اطلاعات به عنوان موقعیت، سرعت و فاصله پردازش میشوند. انکودر چرخشی افزایشی از پرکاربردترین نوع انکودرها است. این انکودرها برعکس انکودر چرخشی عمل میکنند. یعنی هنگامی که اتصال آنها از منبع تغذیه قطع شود، موقعیت قبلی از حافظهاش پاک میشود و مجددا باید خروجیهای قبلی بررسی شوند. از همین جهت قیمت این انکودرها از انکودرهای مطلق پایینتر است.