دفتر تهران : ۰۲۱۹۱۰۹۰۰۸۳
دفتر اصفهان : ۰۳۱۳۲۳۶۸۰۸۳
Info@Pinion.ir


گروه فنی مهندسی پینیون در زمینه فروش و تعمیر قطعات برق و الکترونیک مانند فروش استپ موتور (استپر موتور ، step motor یا steper motor) در مدل های دوفاز (چهارسیم) و سه فاز (شش سیم) و پنج فاز ( هشت سیم) در گشتاورهای خروجی مختلف مناسب برای پرینتر سه بعدی، ساخت CNC و رباتیک فعالیت می کند. برای دریافت مشاوره جهت خرید می توانید از طریق شماره های درج شده با کارشناسان ما تماس بگیرید و از آن ها راهنمایی بخواهید.
فروش استپ موتور اتونیکس ، کینکو ، ال اس ، دنکی ، شینانو ، کنشی ، لید شاین



نوعی از موتورهای الکتریکی براشلس یا بدون جاروبک را استپ موتور ها تشکیل می دهند. این نوع از موتورها را با نام های دیگری نظیر استپر موتور و موتور پله ای نیز می شناسند. در این موتورها یک دور 360 درجه ای را به چند قسمت (پله) مساوی تقسیم کرده اند. که می توان به کمک این پله ها موتور را به اندازه ای مشخص چرخاند و کنترل کرد. تفاوت اصلی موتورهای براش (دارای جاروبک) با براشلس (بدون جاروبک) نیز در این نکته نهفته است که موتورهای جاروبک دار با اعمال ولتاژ به ترمینال ها، به حرکت پیوسته ادامه می دهند.
در حالی که در موتورهای بدون جاروبک با اعمال پالس به ترمینال ها، موتور فقط به اندازه ای مشخص می چرخد. استپ موتورها به صورت حلقه باز کنترل می شوند و به عبارت دیگر برای کنترل نیازی به فیدبک گرفتن ندارند. فرمان ورودی را به شکل پالسی الکتریکی که عموما پالس مربعی است، دریافت می کنند و به همین دلیل است که استپر موتور از دقت بالایی برخوردار است.

امروزه کاربردهای متعددی در صنعت پیدا کرده اند. عموما در تمام مواردی که نیاز است موقعیت دقیق مکانی و زاویه ای را مشخص کنیم، از این موتورها استفاده می شود. انواع دستگاه های CNC ، انواع پرینترهای سه بعدی ، انواع پرینترهای جوهر افشان ، اسکنرها ، انواع ربات ها ، فلاپی درایوها ، لنز انواع مختلفی از دوربین های دیجیتال پلاتر دارای استپ موتور می باشند.
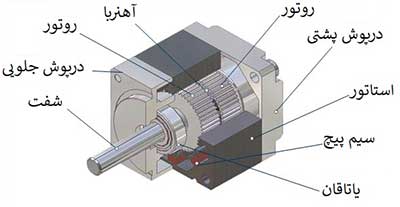
در استپر موتور با اعمال پالس الکتریکی، موتور شروع به چرخش می کند و با هر پالس به میزان مشخصی می چرخد. استپر موتورها عموما دارای دندانه های مغناطیسی (الکترومگنت) هستند که در اطراف شفت آهنی دندانه دار مرکزی موتور قرار گرفته اند. این دندانه های مغناطیسی به وسیله یک مدار خارجی به کمک میکروکنترلر تغذیه می شوند.
برای راه اندازی این موتور، به یکی از مغناطیس ها جریان الکتریکی وارد می شود و در نتیجه میدان مغناطیسی حاصله، دندانه های روتور، جذب مغناطیس مورد نظر می شوند. با رسیدن دندانه به روبه روی مغناطیس، موتور از حرکت باز می ایستد تا پالس بعدی به مغناطیس بعدی اعمال شود و مجدد دندانه و در نتیجه موتور شروع به حرکت کند تا روبه روی مغناطیس بعدی قرار گیرد. هر یک از این چرخش ها را یک استپ می نامند و تعداد مشخصی از این استپ ها یک دور را تشکیل می دهند که در استپر موتورهای مختلف این عدد فرق میکند. ولی نکته اصلی این است که در همه استپ موتورها نسبت تعداد استپ ها به دور موتور یک عدد صحیح خواهد بود.
استپر موتور ها را به طور کل در سه دسته تقسیم بندی می شوند به همین دلیل زمان خرید باید با هر کدام از دسته ها و ویژگی های آن ها به خوبی آشنایی داشته باشید.
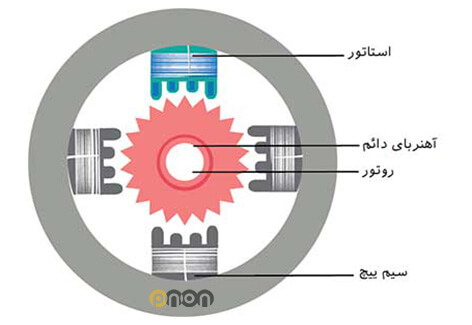
در استپر موتور با آهن ربای دایم، روتور از جنس مغناطیس دائم (آهنربای دائم) ساخته می شود و بر اساس جاذبه و دافعه بین قطب های مغناطیسی استاتور و روتور کار می کند.
|
پینیون در زمینه فروش قطعات برق و الکترونیک از جمله فروش استپ موتور ها فعالیت دارد. برای خرید یا استعلام قیمت استپ موتور ها با ما تماس بگیرید. |
این در حالی است که در استپ موتور با مقاومت مغناطیسی متغیر از روتوری آهنی استفاده می کنند و در این حالت حداقل مقاومت مغناطیسی بین روتور و استاتور مربوط به زمانی است که کمترین فاصله بین قطب ها وجود داشته باشد. این دسته از استپ موتورها به دو دسته تکپارچه (تک تکه) یا چندپارچه (چند تکه) تقسیم می شوند.
در مدل آخر استپ موتورها از هر دو تکنیک فوق استفاده شده است و علت آن را دستیابی به حداکثر توان در کوچکترین فضا می دانند.
در استپ موتور، تعداد دندانه های روتور را قطب و تعداد سیم بندی های استاتور را فاز می نامند.
به منظور درک این موضوع به شکل زیر توجه نمایید که یک استپ موتور دو قطبی و چهار فاز را نشان می دهد: 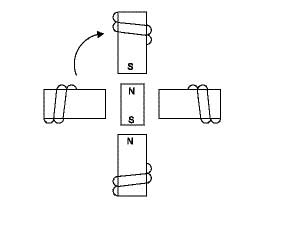
در صورتی که سیم پیچ های استاتور به ترتیب و به صورت فاز به فاز روشن شوند و در اصطلاح عمل کلیدزنی انجام شود. روتور در جهت مورد نظر شروع به چرخش می کند و زاویه ی گام موتور در این حالت 90 درجه خواهد بود. حال اگر کلیدزنی به صورتی انجام شود که در هر لحظه به جای یک فاز، دو فاز همزمان فعال باشند، روتور با زاویه ی گام 45 درجه حرکت خواهد کرد. برای افزایش تعداد گام ها یا کاهش زاویه ی هر گام باید از روتوری با تعداد قطب (دندانه) بیشتر استفاده نمود که می توان شماتیکی از آن را در شکل زیر مشاهده کرد:
همانند دیگر ساخته های بشر، استپ موتورها نیز دارای مزایا و معایبی هستند. ولی در این بین مزایای استپ موتور به مراتب بیشتر از معایب آن است و روز به روز استپ موتورها در حال پیشرفت بوده و معایب این موتورها روز به روز کاهش پیدا می کند.
![]()
برای هر چه بهتر شدن پینیون در ارائه خدمات و اطلاعات لطفا دیدگاه و امتیاز خود را وارد کنید.
امیدواریم در این مقاله توانسته باشیم به سوالات شما پاسخ داده باشیم در صورت نیاز به پشتیبانی و یا مشاوره بیشتر لطفا در قسمت کامنت ها مطرح نمایید تا به بهترین شکل و در اسرع وقت به شما پاسخ داده شود.





















توضیحات بسیار عالی