دفتر تهران : ۰۲۱۹۱۰۹۰۰۸۳
دفتر اصفهان : ۰۳۱۳۲۳۶۸۰۸۳
Info@Pinion.ir

گروه فنی مهندسی بازرگانی پینیون در زمینه فروش و بازرگانی انواع تجهیزات برق و الکترونیک از جمله فروش رزولور (فروش ریزولور) فعالیت دارد.
انواع انکودر و رزولور را از ما بخواهید.
در این مقاله به طرز عملکرد رزولور و مقایسه با انکودر می پردازیم.
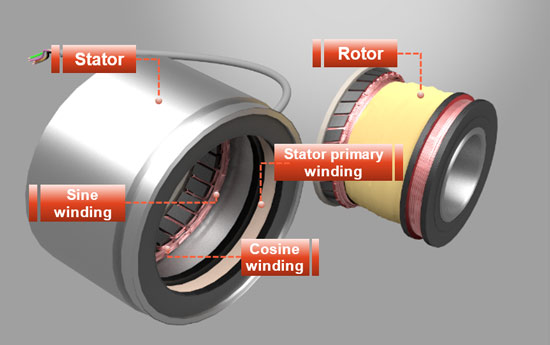
قسمت های مختلف یک رزولور براشلس ترنسمیتر
رزولور از یک قسمت ثابت به نام «استاتور»، و یک قسمت که به شفت موتور متصل می شود، به نام «روتور» تشکیل شده است.
متداول ترین نوع رزولور، براشلس ترزمیتر میباشد. از نگاه بیرونی، رزولور شبیه یک موتور کوچک است، اما وقتی به ساختار داخلی آن نگاه میکنیم تفاوت بسیاری را بالاخص در نحوه سیم پیچی شاهد هستیم.
استاتور از سه سیم پیچ به نام های «تحریک»، «X» و«Y» (نام گذاری مرسوم در نوع براشلس) تشکیل شده است.
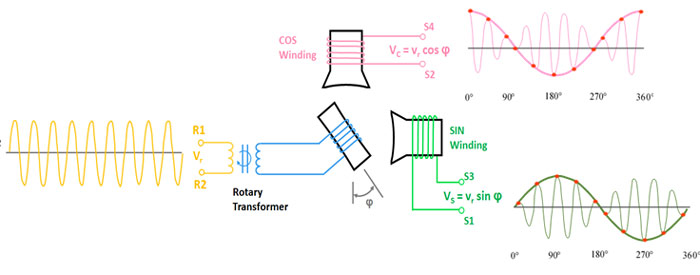
سیگنال های ورودی و خروجی در یک رزولور فرستنده (ترنزمیتر)
پایه ای ترین نوع رزولور، مدل دوقطبی است که در بالا توضیح داده شد.
در این نوع، یک دور چرخش مکانیکی معادل یک دوره سیگنال الکتریکی است. مدل دیگر ریزولور چندقطبی است که از p جفت سیم پیچ ثانویه در استاتور یا همان قطب تشکیل شده است. در این مدل هر دور چرخش مکانیکی معادل p دوره سیگنال الکتریکی است. بعضی از انواع رزولور، هر دو مدل را همزمان دارا هستند. سیم پیچی دو قطبی برای تعیین زاویه مطلق شفت و سیم پیچی چند قطبی برای تعیین مکان دقیق شفت بکار می رود. مدل دوقطبی نهایتا تا 5’ دقت دارند.
مثلا یک رزولور با 128 قطب می تواند تا 1” دقت در اندازه گیری زاویه داشته باشد. از رزولور چند قطبی در کاربردهایی که احتیاج به اندازه گیری با دقت بالا میباشد استفاده می شود؛ مثل سکوهای چرخشی آنتن یا در ربات ها.

Resolver تولیدی شرکت LTN آلمان
تا به اینجا صحبت از رزولورهای براشلس فرستنده (ترنسمیتر) بود. انواع دیگر رزولور شامل رزولور گیرنده و تفاضلی نیز می شود.
رزولور گیرنده برعکس ریزولور فرستند (ترنزمیتر) عمل میکند. به این معنا که بر خلاف مدل فرستنده، به سیم پیچ های X و Y یا همان کسینوس و سینوس ولتاژ اعمال می شود و در سیم پیچ ترانسفورمر دوار بر روی استاتور، نسبت سینوس و کسینوس نشان دهنده زاویه گردشی روتور خواهد بود.
این مدل تلفیقی از دو مدل گیرنده و فرستنده است. به این معنا که دو جفت قطب بصورت مستقل در استاتور وجود دارد که یک جفت گیرنده سیگنال هستند و سیگنال اعمالی با توجه به زاویه مکانیکی به روتور القاء می شود. سیگنال موجود در روتور نیز مجددا به جفت سیگنال فرستنده القاء می شود. این مدل برای مثال در محاسبه گرهای آنالوگ توابع مثلثاتی کاربرد دارند.
رزولور و انکودر هر دو برای اندازه گیری مکان زاویه ای شفت استفاده می شوند. رزولور ها قدمت بیشتری داشته و در صنایع نظامی بکار میرفتند و بخاطر نوع طراحی ساده و در عین حال نیرومند آن ها، مناسب برای محیط های صنعتی میباشند. اما رفته رفته این انکودرها بودند که جای رزولورها را در کاربردهای گوناگون گرفتند. ریزولورها همچنان مناسب کاربردهای خشن مانند صنایع نظامی و هوافضا میباشند.
مهم ترین مزیت رزولورها نبودن هیچ قطعه حساسی در ساختار آن هاست. این باعث می شود که تحمل بسیار بیشتری در برابر ضربه و لرزش داشته باشند. آن ها همچنین در برابر نویزهای الکتریکی مقاومند و به دلیل عدم وجود قطعات نیمه هادی، تحمل دمایی بسیار بالاتر و طول عمر بیشتری به نسبت انکودرها دارند.
برای تحلیل سیگنال آنالوگ خروجی ریزولورها به مدار واسطی به نام مبدل رزولور (RDS) نیاز است. RDS و مبدل رزولور مدارات فیلتر و دقتی که در اتصال و تطبیق این مدارات با سیستم کنترلی نیاز است، باعث می شود پیچیدگی و هزینه متصل کردن یک رزولور به سیستم بسیار افزایش یابد. این مدارات ممکن است 3 تا 5 برابر خود رزولور هزینه داشته باشند. در نقطه مقابل، انکودرها تجهیزاتی دیجیتالی هستند و ارتباط آن ها با سیستم کنترلی بدون نیاز به مدارات پیچیده و با هزینه کمتر صورت میگیرد.
انکودرها وزن و اینرسی گردشی کمتری به نسبت رزولورها دارند که این باعث میشود در سیستم هایی که دارای شتاب بالا هستند ترجیحا از انکودرها استفاده شود. به علاوه، نرخ تبدیل در مدارات RDS باعث بروز محدودیت در سرعت بیشینه سیستم می شود و دقت رزولور را در سرعت های بالا کمتر میکند. دقت انکودرها نیز در حدود 20” است که نسبت به دقت حدودی 3’ در رزولورها، بسیار بهتر است.
مزیت دیگر انکودر که آن را بیشتر جذاب کرده این است که تعویض یک انکودر در سیستم، نهایتا با تغییر در اتصالات فیدبک و سیستم نرم افزاری صورت می گیرد. اما در رزولورها، این تعویض احتمالا با تغییر مبدل، فیلتر، منبع تغذیه و فرکانس همراه است. ذکر این نکته هم ضروریست که با پیشرفت تکنولوژی، طراحی انکودرها هم ارتقاء پیدا کرده و قوی تر شده است. امروزه در بسیاری از کاربردهایی که قبلا فقط رزولورها پاسخگو بودند، میتوان از انکودرها نیز استفاده کرد و تمام مزایای ذکر شده آنها را به همراه طول عمر و قدرت تحمل بالا بدست آورد.